作者其它图纸
查看更多

猜你喜欢

| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | +必看说明+.txt | 2.22 KB |
| 2 | 【 屿双网 www.ysh3d.com 】 更多【资料】【图档】.url | 177 B |
| 3 | 公众号免费下载.jpg | 79 KB |
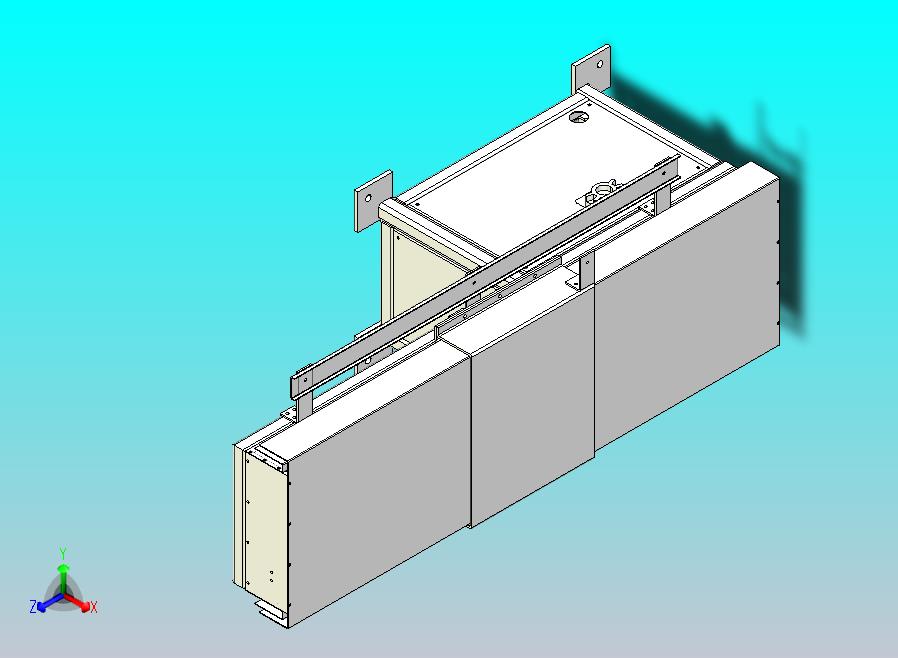
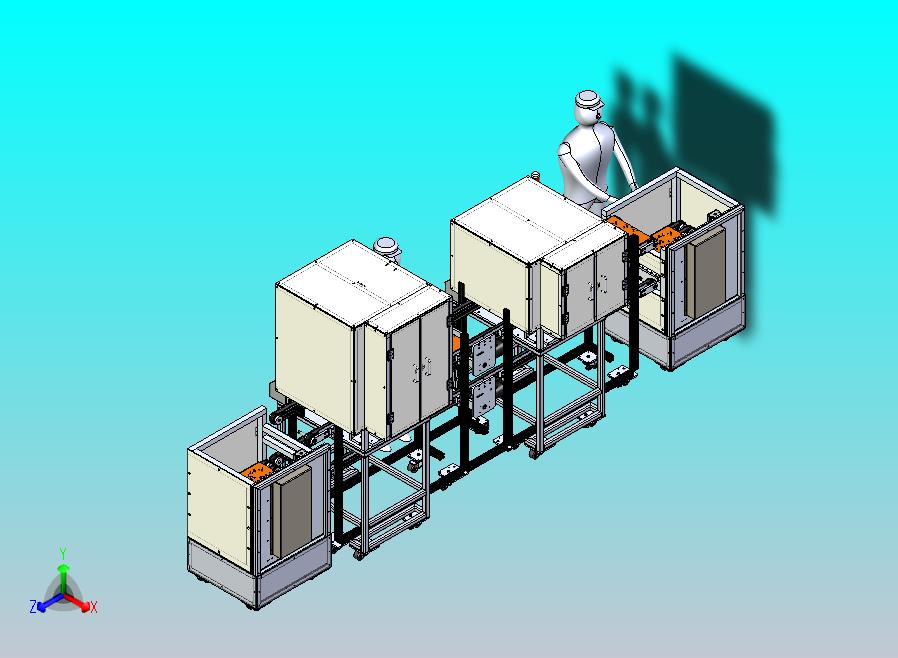
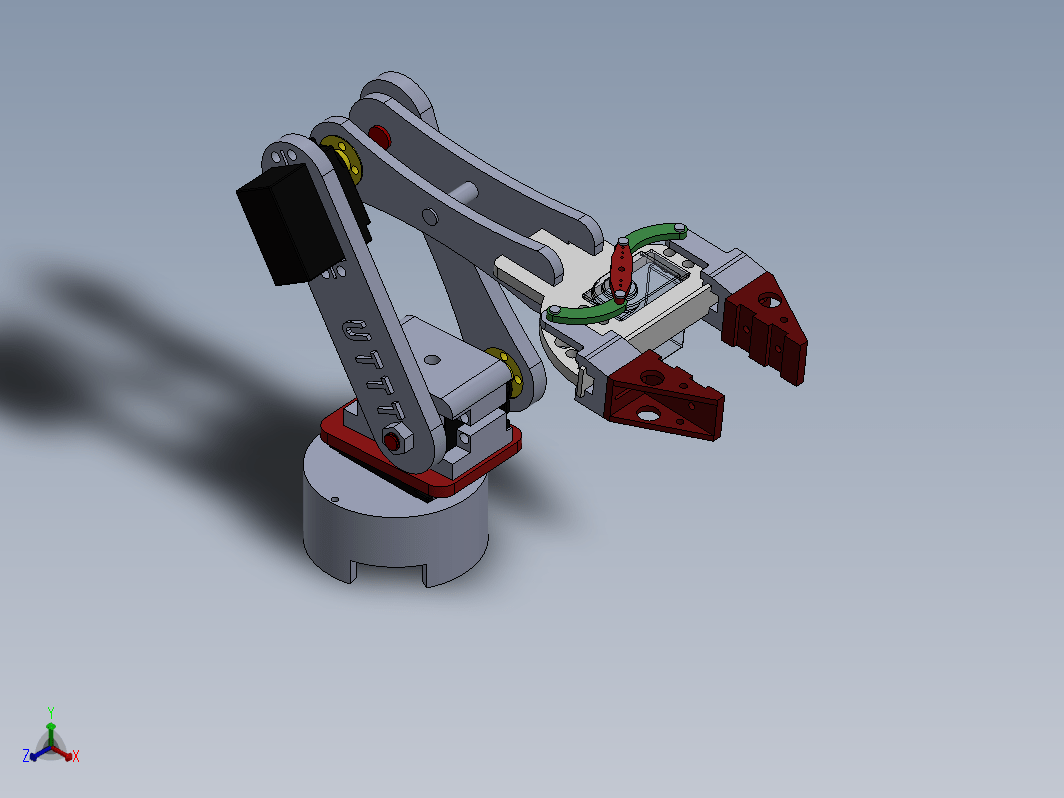
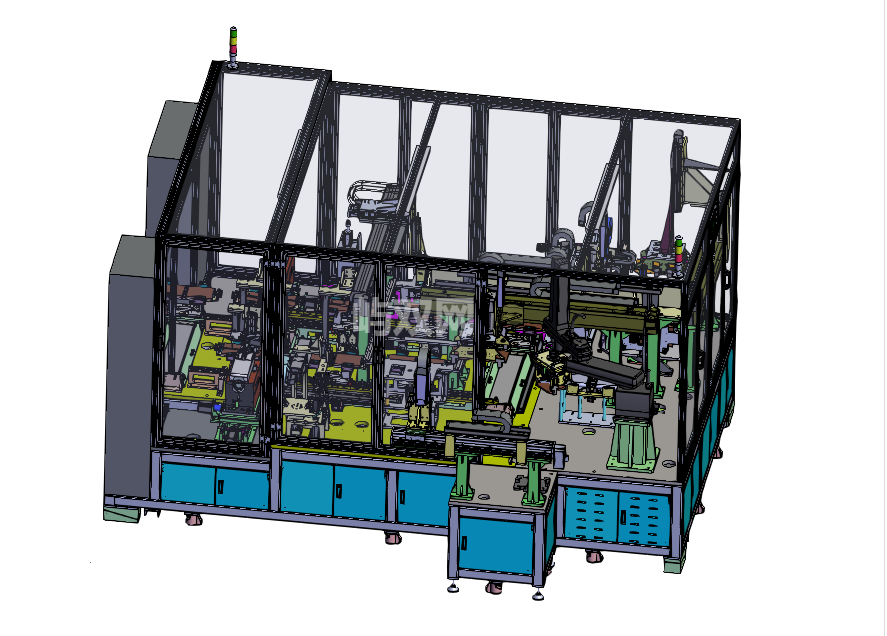
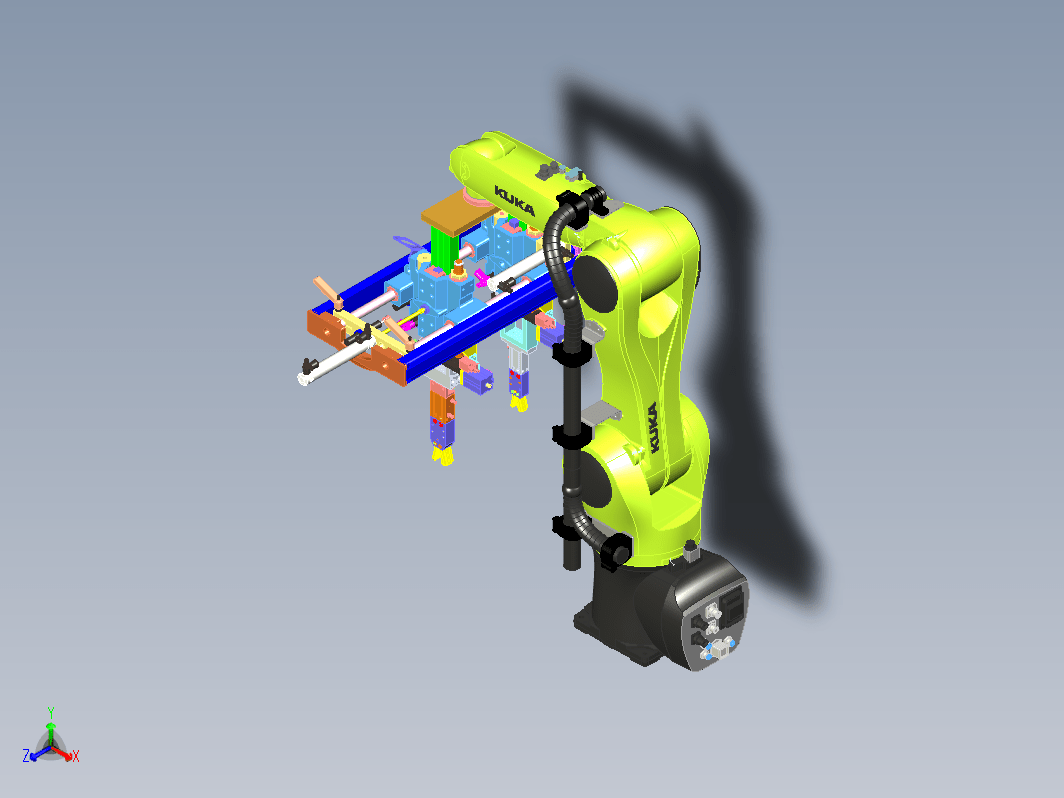
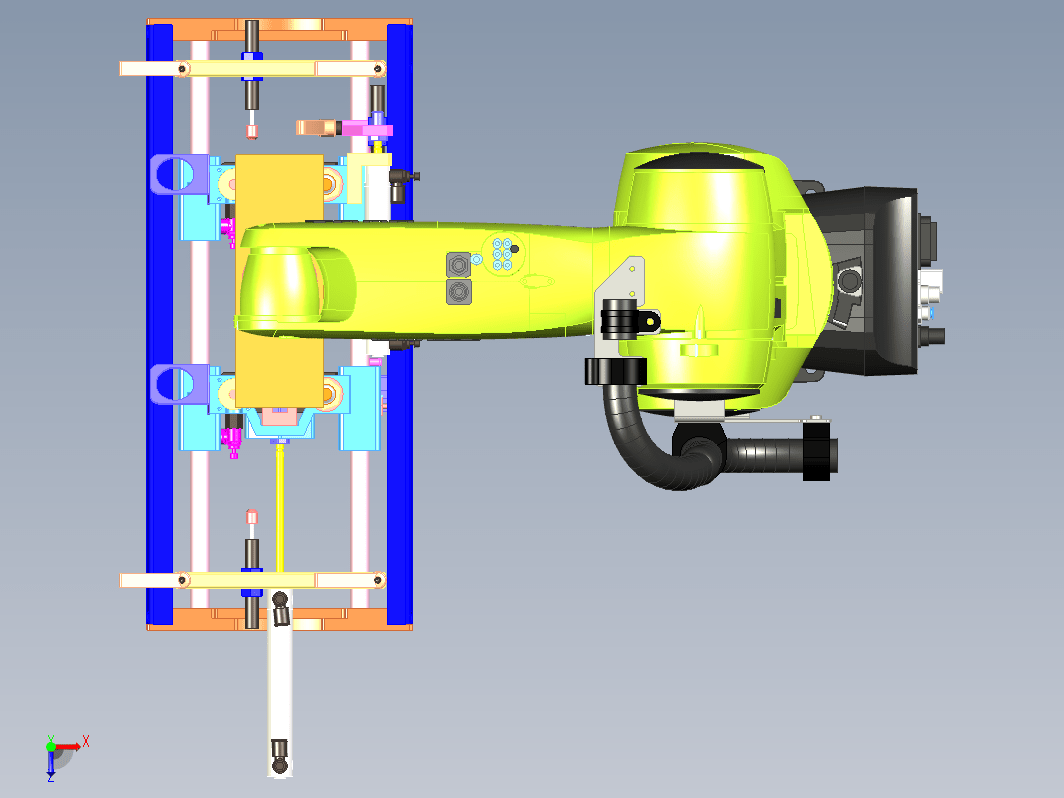
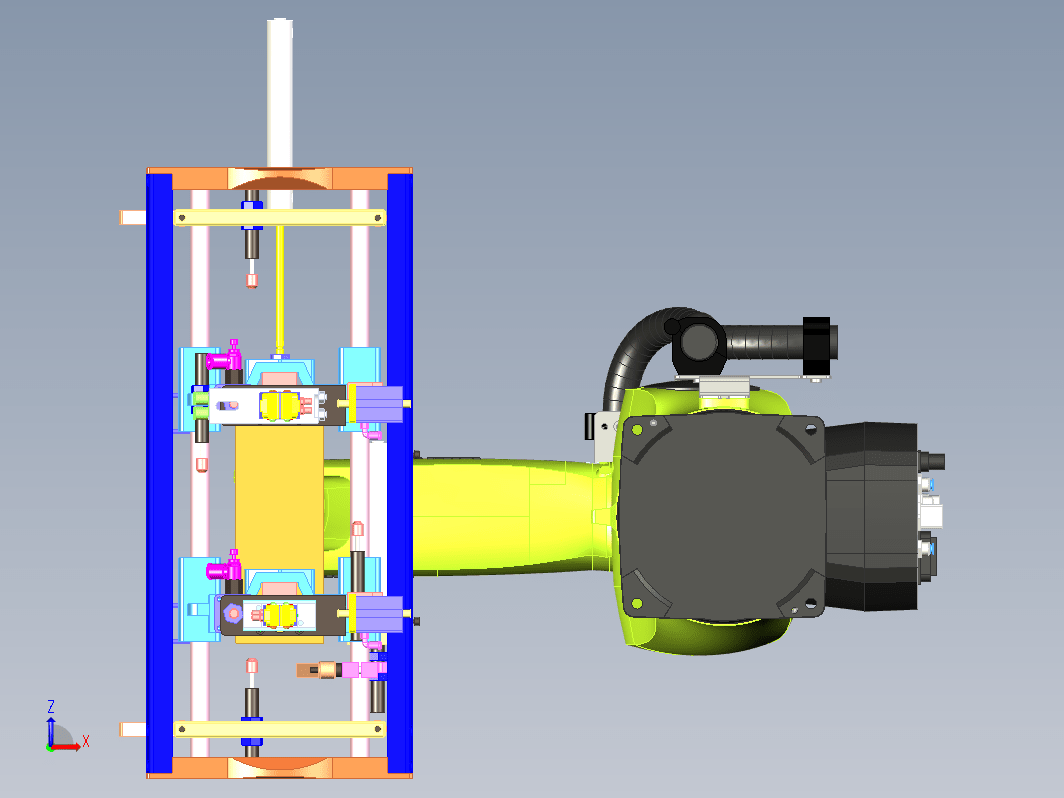
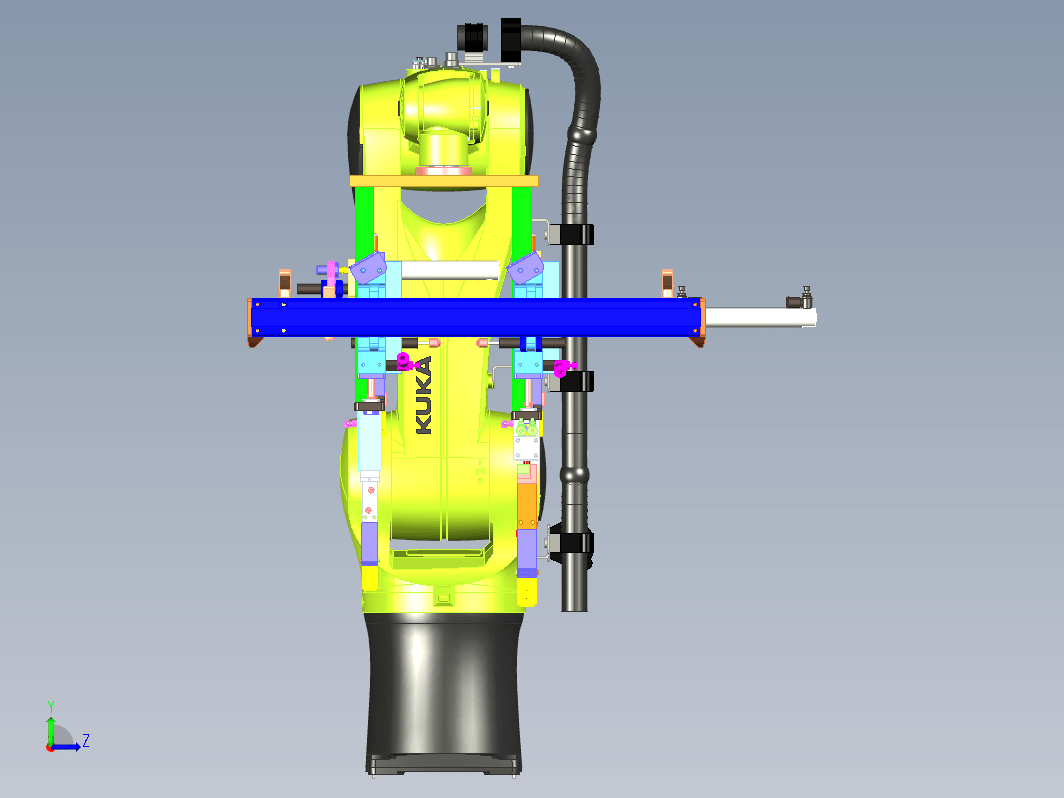
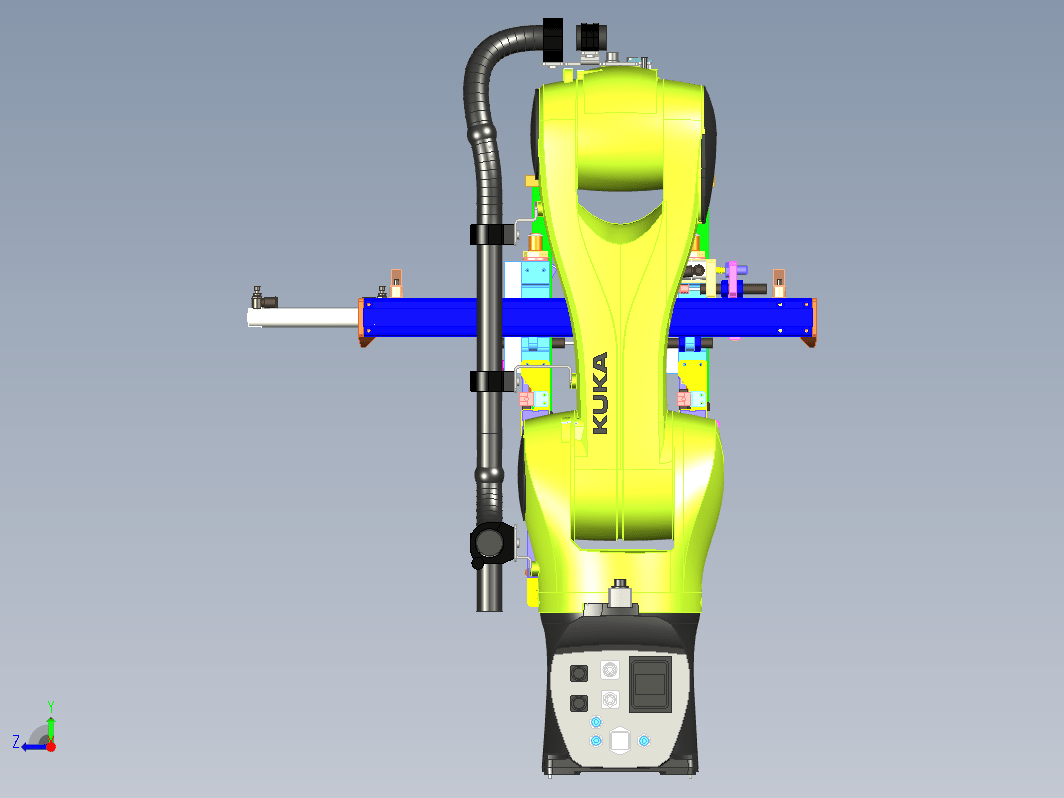
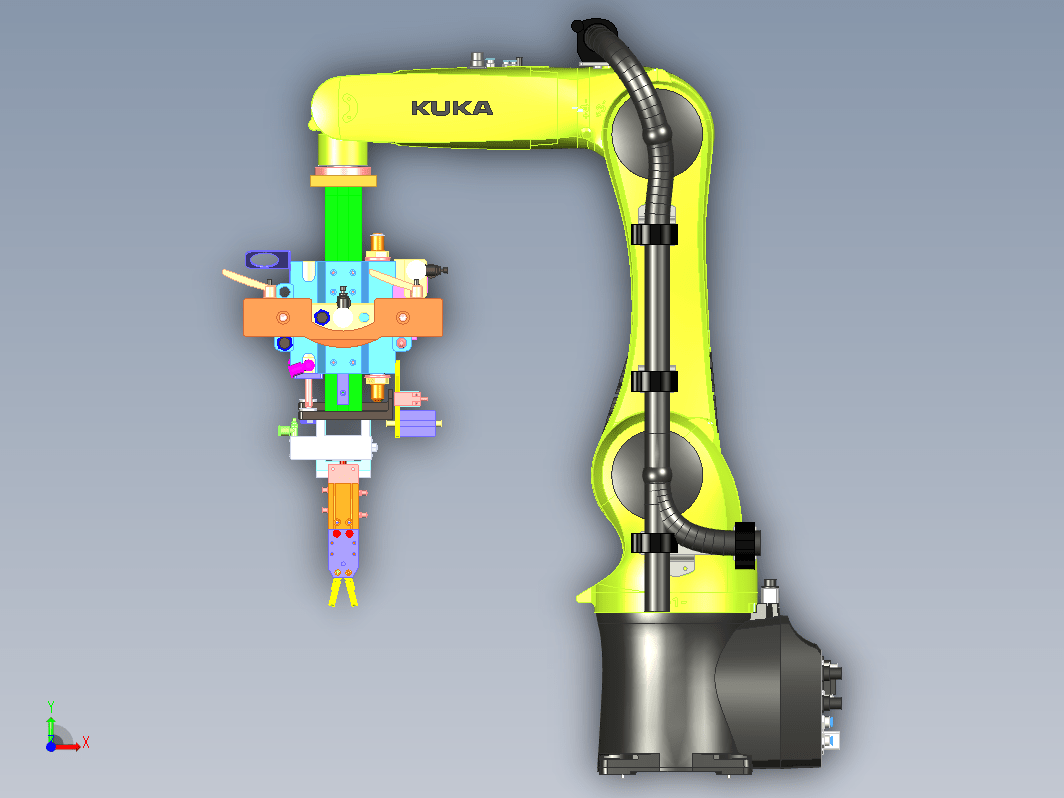
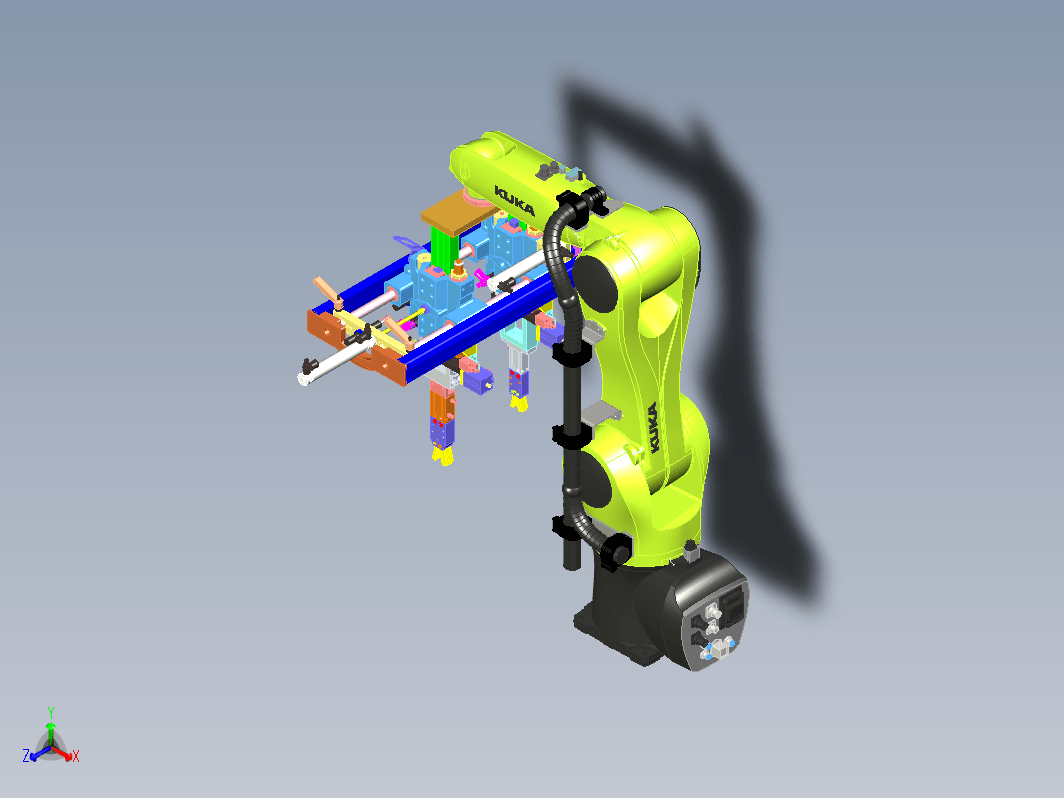
| 4 | 机器人双夹爪自动化抓取抱具设计.x_t | 10 MB |



下载该图档需要消耗30金币!