

作者其它图纸
查看更多


猜你喜欢




| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | +必看说明+.txt | 2.22 KB |
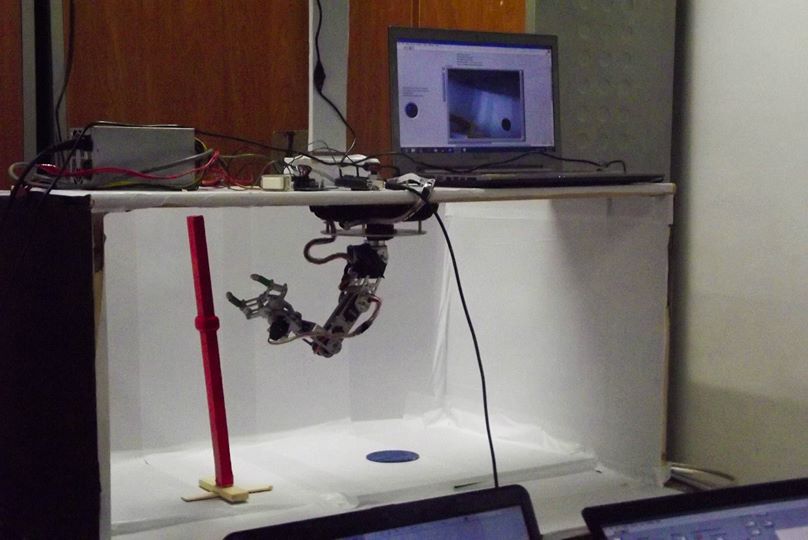
| 2 | 10317809_10154243329700048_939401092506606732_o.jpg | 70.4 KB |
| 3 | 10387020_10154243237880048_3835836052796957310_o.jpg | 59.4 KB |
| 4 | 10450745_10154243229605048_1724543751085352735_n.jpg | 83.6 KB |
| 5 | 10484623_10154243229605048_1724543751085352735_o.jpg | 51 KB |
| 6 | 32bfe50ff72106b106.pdf | 330 KB |
| 7 | Arm.JPG | 268 KB |
| 8 | Arm.JPG | 268 KB |
| 9 | Arm.SLDASM | 1.43 MB |
| 10 | Arm2.JPG | 268 KB |
| 11 | Arm_3.0.lvproj | 16.2 KB |
| 12 | Arm_3.0_POT.lvproj | 21.3 KB |
| 13 | Arm_3.0_POT.vi | 535 KB |
| 14 | Arm_3.0_slider.vi | 537 KB |
| 15 | Assem4.sldasm | 704 KB |
| 16 | Assem4.sldasm | 704 KB |
| 17 | Bachelor_Thesis_-_Amos.pdf | 3.13 MB |
| 18 | Base+Servo.SLDASM | 259 KB |
| 19 | Base+Servo.SLDASM | 259 KB |
| 20 | Book Mechatronic.Servo.System.Control-3540210962.pdf | 6.12 MB |
| 21 | BuildingRealtimeAnalysis.pdf | 895 KB |
| 22 | Continuous Serial Read and mapp.vi | 189 KB |
| 23 | Create Puma560.vi | 29.6 KB |
| 24 | Cuerpo.SLDPRT | 541 KB |
| 25 | Cuerpo.SLDPRT | 541 KB |
| 26 | DCMDraft2.pdf | 341 KB |
| 27 | Documentation-EMG control final.docx | 3.04 MB |
| 28 | EMG Robot Control-User Manual.pdf | 1.1 MB |
| 29 | ElementByElement.vi | 12.6 KB |
| 30 | EulerAngles.pdf | 135 KB |
| 31 | GEAR11.SLDPRT | 794 KB |
| 32 | GEAR11.SLDPRT | 794 KB |
| 33 | GEAR21.SLDPRT | 798 KB |
| 34 | GEAR21.SLDPRT | 798 KB |
| 35 | Gripper_New.SLDASM | 361 KB |
| 36 | Gripper_New.SLDASM | 361 KB |
| 37 | IMG-20140615-WA0022.jpg | 76.9 KB |
| 38 | In_Range.vi | 10.1 KB |
| 39 | Interfacing btwn Matlab&SolidWorks.pdf | 770 KB |
| 40 | LabView_11.ive | 458 KB |
| 41 | LabView_26.ive | 472 KB |
| 42 | LabView_35.ive | 683 KB |
| 43 | LabView_5.ive | 270 KB |
| 44 | LabView_92.ive | 1.14 MB |
| 45 | Link1+Link2.SLDASM | 262 KB |
| 46 | Link1+Servo.SLDASM | 228 KB |
| 47 | Link1+Servo.SLDASM | 228 KB |
| 48 | Link1.SLDPRT | 279 KB |
| 49 | Link1.SLDPRT | 279 KB |
| 50 | Link2+Servo.SLDASM | 298 KB |
| 51 | Link2+Servo.SLDASM | 298 KB |
| 52 | Link4+Servo.SLDASM | 227 KB |
| 53 | Link4+Servo.SLDASM | 227 KB |
| 54 | Math.h | 2.18 KB |
| 55 | Muscle Sensor Platinum v3.3.pdf | 18.8 KB |
| 56 | Muscle Sensor v3 Users Manual.pdf | 257 KB |
| 57 | My Inverse Kinematics Example VI.vi | 17.4 KB |
| 58 | My Inverse Kinematics Example VI.vi | 17.5 KB |
| 59 | My Kinematics Example VI.vi | 30.9 KB |
| 60 | My Kinematics Example VI.vi | 31 KB |
| 61 | Nearest_Element_SubVI.vi | 22.4 KB |
| 62 | Nearest_Element_SubVI.vi | 22.4 KB |
| 63 | Our Team.jpg | 65.8 KB |
| 64 | POT_Library.lvlib | 7.05 KB |
| 65 | Paper_11-Gesture_Controlled_Robot_using_Image_Processing.pdf | 978 KB |
| 66 | Poly_IMUs_Rzor_AHRS.cpp | 24.8 KB |
| 67 | Poly_IMUs_Rzor_AHRS.h | 10.3 KB |
| 68 | Razor_AHRS.ino | 8.98 KB |
| 69 | Robot_Arm_Sketch.ino | 2.12 KB |
| 70 | Robotic Arm.sldasm | 639 KB |
| 71 | Robotics Environment Simulatorv02 ID List.txt | 506 B |
| 72 | Robotics Environment Simulatorv02 ID List.txt | 524 B |
| 73 | Robotics Environment Simulatorv02 ID List.txt | 524 B |
| 74 | Robotics Environment Simulatorv02.vi | 47.6 KB |
| 75 | Robotics Environment Simulatorv02.vi | 49 KB |
| 76 | Robotics Environment Simulatorv02.vi | 64.5 KB |
| 77 | Robotics Environment Simulatorv02.xml | 52.5 KB |
| 78 | Robotics Environment Simulatorv02.xml | 56.3 KB |
| 79 | Robotics Environment Simulatorv02.xml | 56.3 KB |
| 80 | Robotics Project.aliases | 44 B |
| 81 | Robotics Project.aliases | 46 B |
| 82 | Robotics Project.lvlps | 83 B |
| 83 | Robotics Project.lvlps | 83 B |
| 84 | Robotics Project.lvproj | 16.6 KB |
| 85 | Robotics Project.lvproj | 16.6 KB |
| 86 | SAVE.vi | 23.6 KB |
| 87 | Serial - ASCII Characters.ctl | 11.7 KB |
| 88 | Serial - Settings.ctl | 23.2 KB |
| 89 | Serial - XON-XOFF Characters.ctl | 12.3 KB |
| 90 | Serial_Read.vi | 13.2 KB |
| 91 | Serial_Read_Array.vi | 13.5 KB |
| 92 | Serial_Read_Array_Sheet.vi | 17.9 KB |
| 93 | Serial_Read_Array_up1.vi | 12.5 KB |
| 94 | Sheet_Delete.vi | 31.9 KB |
| 95 | Sheet_Insert.vi | 33.9 KB |
| 96 | Sheet_Load.vi | 32.5 KB |
| 97 | Sort_Time.vi | 12.6 KB |
| 98 | Sort_Time.vi | 12.6 KB |
| 99 | Thumbs.db | 39.5 KB |
| 100 | Training_Interface.vi | 61.3 KB |
| 101 | Training_Interface.vi | 79.5 KB |
| 102 | Training_Interface_v2.0.vi | 63.1 KB |
| 103 | Training_Project.aliases | 47 B |
| 104 | Training_Project.lvlps | 84 B |
| 105 | Training_Project.lvproj | 8.04 KB |
| 106 | Untitled Library 1.lvlib | 5.96 KB |
| 107 | Untitled Project 1.aliases | 47 B |
| 108 | Untitled Project 1.lvlps | 85 B |
| 109 | Untitled Project 1.lvproj | 11.6 KB |
| 110 | WP_SEMGintro.pdf | 301 KB |
| 111 | arm1.JPG | 364 KB |
| 112 | arm1.JPG | 364 KB |
| 113 | arm_fb.JPG | 70.6 KB |
| 114 | base.SLDPRT | 176 KB |
| 115 | base.SLDPRT | 176 KB |
| 116 | base_adaptor.SLDPRT | 128 KB |
| 117 | base_adaptor.SLDPRT | 128 KB |
| 118 | base_bottom.SLDPRT | 174 KB |
| 119 | base_bottom.SLDPRT | 174 KB |
| 120 | circular_coupling.SLDPRT | 126 KB |
| 121 | circular_coupling.SLDPRT | 126 KB |
| 122 | collapsed_drawing.PNG | 17.5 KB |
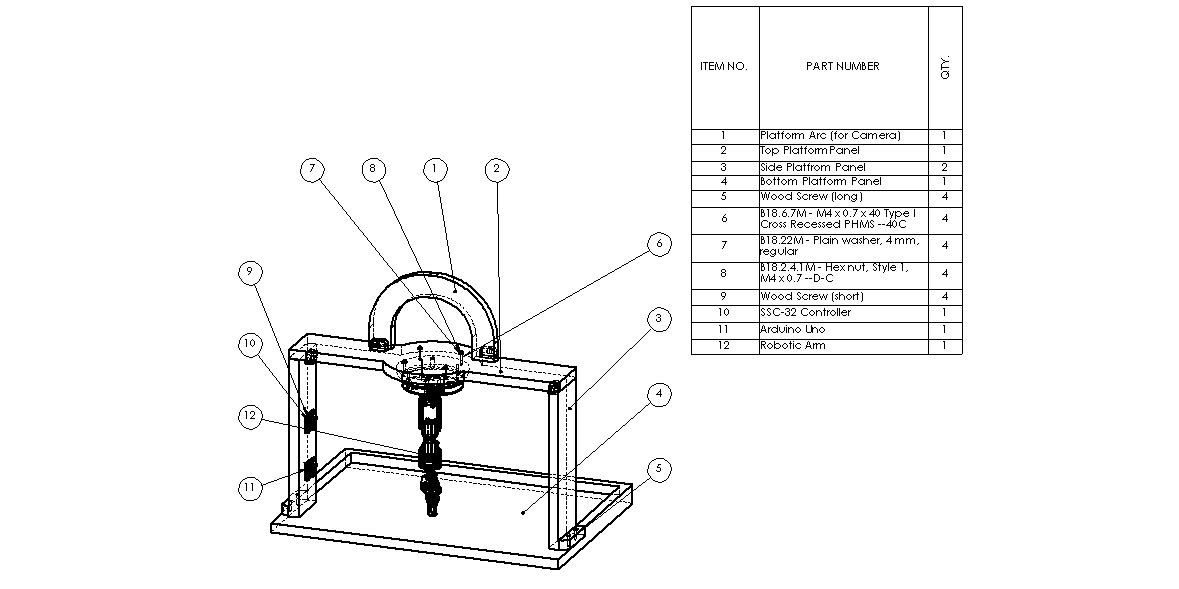
| 123 | cucs-481-89.pdf | 1000 KB |
| 124 | cyl_object.SLDPRT | 165 KB |
| 125 | download.pdf | 692 KB |
| 126 | eulersequences.doc | 947 KB |
| 127 | exploded_drawing.PDF | 634 KB |
| 128 | exploded_drawing.PNG | 14.8 KB |
| 129 | exploded_drawing.SLDDRW | 417 KB |
| 130 | exploded_drawing_c.PNG | 159 KB |
| 131 | final (F&I Kinematics & Simulation Environment).aliases | 44 B |
| 132 | final (F&I Kinematics & Simulation Environment).lvlps | 83 B |
| 133 | final (F&I Kinematics & Simulation Environment).lvproj | 18.8 KB |
| 134 | grip11.SLDPRT | 158 KB |
| 135 | grip11.SLDPRT | 158 KB |
| 136 | grip2.SLDPRT | 290 KB |
| 137 | grip2.SLDPRT | 290 KB |
| 138 | grip3.SLDPRT | 228 KB |
| 139 | grip3.SLDPRT | 228 KB |
| 140 | grip41.SLDPRT | 247 KB |
| 141 | grip41.SLDPRT | 247 KB |
| 142 | grip51.SLDPRT | 215 KB |
| 143 | grip51.SLDPRT | 215 KB |
| 144 | gripper servo.SLDASM | 220 KB |
| 145 | gripper servo.SLDASM | 220 KB |
| 146 | license.txt | 41.8 KB |
| 147 | link1_adaptor.SLDPRT | 138 KB |
| 148 | link1_adaptor.SLDPRT | 138 KB |
| 149 | link2_adaptor.SLDPRT | 144 KB |
| 150 | link2_adaptor.SLDPRT | 144 KB |
| 151 | link2_face.SLDPRT | 200 KB |
| 152 | link2_face.SLDPRT | 200 KB |
| 153 | link3_face.SLDPRT | 203 KB |
| 154 | link3_face.SLDPRT | 203 KB |
| 155 | link4.SLDPRT | 337 KB |
| 156 | link4.SLDPRT | 337 KB |
| 157 | nail_M4_40.SLDPRT | 473 KB |
| 158 | nut_M4.SLDPRT | 487 KB |
| 159 | ourarm 0.1.vi | 26.1 KB |
| 160 | ourarm 0.1.vi | 26.1 KB |
| 161 | ourarm 0.1.vi | 26.1 KB |
| 162 | pin1.SLDPRT | 101 KB |
| 163 | pin1.SLDPRT | 101 KB |
| 164 | platform_3_arc.SLDPRT | 254 KB |
| 165 | platform_3_arc_ass.SLDASM | 247 KB |
| 166 | platform_3_bottom.SLDPRT | 405 KB |
| 167 | platform_3_side1.SLDPRT | 264 KB |
| 168 | platform_3_side1_ass.SLDASM | 285 KB |
| 169 | platform_3_side2.SLDPRT | 261 KB |
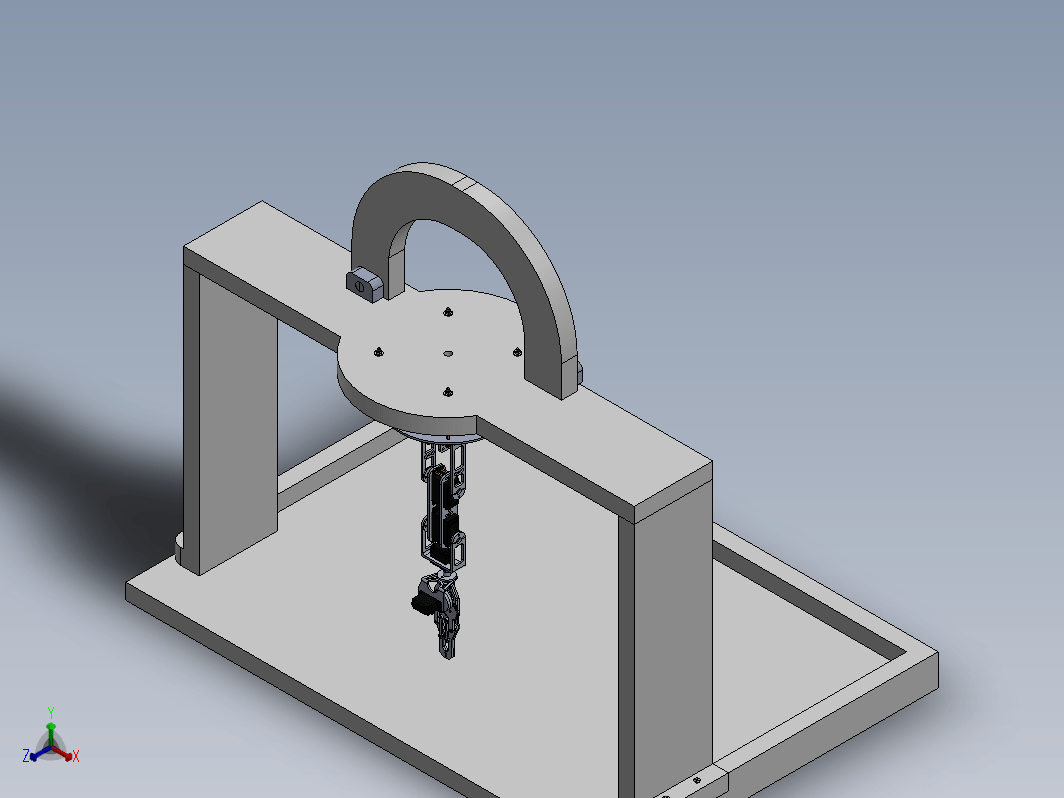
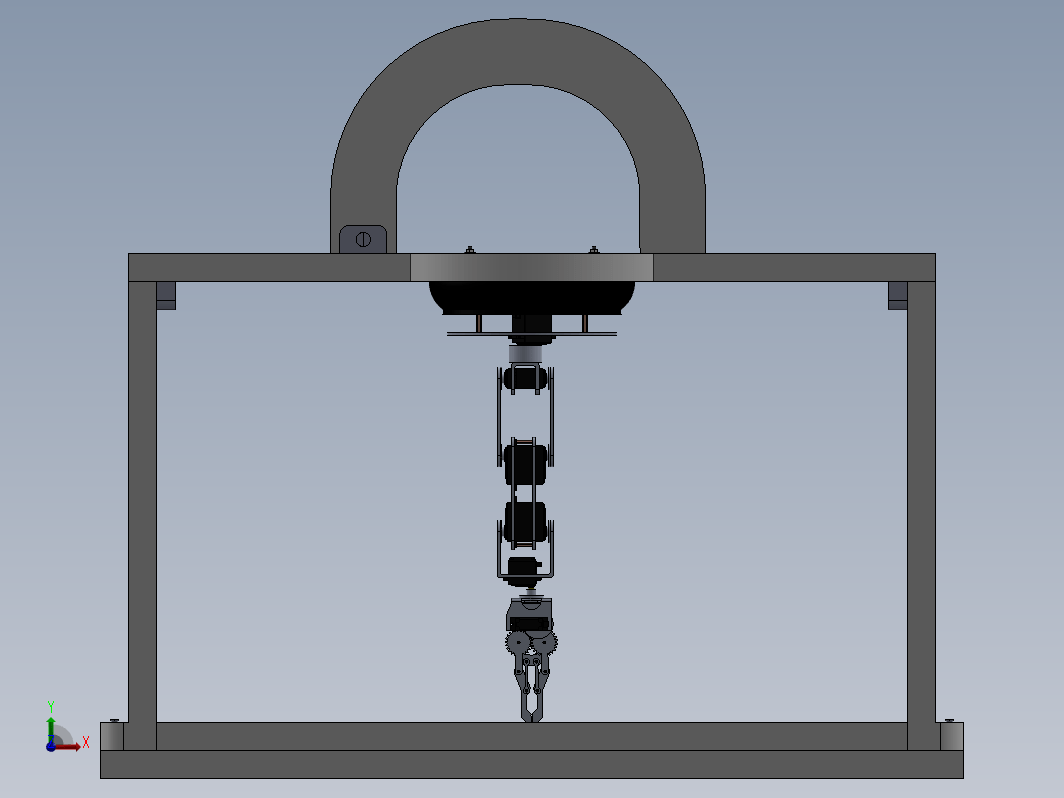
| 170 | platform_3_side2_ass.SLDASM | 250 KB |
| 171 | platform_3_top.SLDPRT | 278 KB |
| 172 | platform_3_top_ass.SLDASM | 275 KB |
| 173 | platfrom_2_drawing.SLDDRW | 279 KB |
| 174 | platfrom_3.SLDASM | 416 KB |
| 175 | servo_big_double.SLDPRT | 331 KB |
| 176 | servo_big_double.SLDPRT | 331 KB |
| 177 | servo_small.SLDPRT | 447 KB |
| 178 | servo_small.SLDPRT | 447 KB |
| 179 | small gear_new2.SLDPRT | 747 KB |
| 180 | small gear_new2.SLDPRT | 747 KB |
| 181 | spacer.SLDPRT | 143 KB |
| 182 | spacer.SLDPRT | 143 KB |
| 183 | spacer_long.SLDPRT | 137 KB |
| 184 | spacer_long.SLDPRT | 137 KB |
| 185 | the arm , forearm and hand.docx | 968 KB |
| 186 | v0.1.ive | 24.8 MB |
| 187 | v0.1.stl | 95.9 MB |
| 188 | v0.1.wrl | 37.4 MB |
| 189 | v0.2.wrl | 37 MB |
| 190 | v0.3.wrl | 36.5 MB |
| 191 | v72-48.pdf | 818 KB |
| 192 | wall.SLDPRT | 276 KB |
| 193 | wall.ive | 33 KB |
| 194 | washer_M4.SLDPRT | 221 KB |
| 195 | wood_joint_female.PNG | 6.16 KB |
| 196 | wood_joint_female.SLDPRT | 147 KB |
| 197 | wood_joint_male.SLDPRT | 89.5 KB |
| 198 | wood_nail.SLDPRT | 136 KB |
| 199 | wood_nail_small.SLDPRT | 139 KB |
| 200 | wrist.ive | 274 KB |
| 201 | ~$Arm - Copy.SLDASM | 6 B |
| 202 | ~$Arm_Test.SLDASM | 6 B |
| 203 | ~$Base+Servo++.SLDASM | 6 B |
| 204 | ~$Gear 11.SLDPRT | 6 B |
| 205 | ~$Gear 21.SLDPRT | 6 B |
| 206 | ~$Link1+Link2.SLDASM | 6 B |
| 207 | ~$link4_adaptor.SLDPRT | 6 B |
| 208 | ~$nail_4_16.SLDPRT | 6 B |
| 209 | ~$nail_M4_40.SLDPRT | 6 B |
| 210 | ~$nut_M4.SLDPRT | 6 B |
| 211 | ~$pin2.SLDPRT | 6 B |
| 212 | ~$platform_3_bottom.SLDPRT | 6 B |
| 213 | ~$platform_3_side2.SLDPRT | 6 B |
| 214 | ~$platform_3_top.SLDPRT | 6 B |
| 215 | ~$platform_side1_ass.SLDASM | 6 B |
| 216 | ~$platfrom_3.SLDASM | 6 B |
| 217 | ~$small gear_new.SLDPRT | 6 B |
| 218 | ~$small_gear.SLDPRT | 6 B |
| 219 | ~$washer_M4.SLDPRT | 6 B |
| 220 | ~$wood_joint_male.SLDPRT | 6 B |
| 221 | ~$wood_nail.SLDPRT | 6 B |
| 222 | ~$wood_nail_small.SLDPRT | 6 B |
| 223 | 【 屿双网 www.ysh3d.com 】 更多【资料】【图档】.url | 177 B |
| 224 | 公众号免费下载.jpg | 79 KB |



下载该图档需要消耗40金币!


![RZGB-1型波纹型阻火器[DN80] (2)](https://yushuangwang2.oss-accelerate.aliyuncs.com/fileimg/m67790619ef90a/01_home.jpg)
![BDKK60-F0模组[BDKK6005C-300S1-F1CS2]](https://yushuangwang2.oss-accelerate.aliyuncs.com/fileimg/m68a2a34d513dc/01_home.jpg)

