

作者其它图纸
查看更多

猜你喜欢



| # | 文件名称 | 文件大小 |
|---|---|---|
| 1 | 0.770_ Clamping Hubs.SLDPRT | 192 KB |
| 2 | 1'' Bore clamping hub B.SLDPRT | 205 KB |
| 3 | 1'' Bore tube Clamp A.SLDPRT | 217 KB |
| 4 | 1.jpg | 260 KB |
| 5 | 2.jpg | 240 KB |
| 6 | 3.jpg | 129 KB |
| 7 | 4.jpg | 354 KB |
| 8 | 5.16 Precision shafting.SLDPRT | 67.5 KB |
| 9 | 5.jpg | 92.1 KB |
| 10 | 6.jpg | 256 KB |
| 11 | Arbre Moteur.SLDPRT | 68 KB |
| 12 | Assemblage bras.SLDASM | 2.66 MB |
| 13 | Bati.SLDPRT | 475 KB |
| 14 | Caisse servo.SLDPRT | 199 KB |
| 15 | Channel 12''.SLDPRT | 1.32 MB |
| 16 | Channel 3''.SLDPRT | 1.16 MB |
| 17 | Channel Bracket C.SLDPRT | 149 KB |
| 18 | Coprs Verin 4''.SLDPRT | 196 KB |
| 19 | Coprs Verin 6''.SLDPRT | 204 KB |
| 20 | Drivesystem_manipulator#01.SLDASM | 91.5 KB |
| 21 | Endeffector#01.SLDASM | 364 KB |
| 22 | Engrenage 2 FINIT (x3).SLDPRT | 131 KB |
| 23 | Engrenage GRAND new.SLDPRT | 657 KB |
| 24 | Flanged ball bearings.SLDPRT | 71 KB |
| 25 | Flat Single Channel Bracket.SLDPRT | 101 KB |
| 26 | Flipper#21.SLDASM | 491 KB |
| 27 | Gearbox#23_body_front#01.SLDPRT | 313 KB |
| 28 | Gearbox#23_body_top#01.SLDPRT | 142 KB |
| 29 | Gearbox#31.SLDASM | 228 KB |
| 30 | Gearbox#31_body_bottom#01.SLDPRT | 244 KB |
| 31 | Gearbox#31_body_left#01.SLDPRT | 255 KB |
| 32 | Gearbox#31_body_right#01.SLDPRT | 249 KB |
| 33 | Gearbox#41.SLDASM | 546 KB |
| 34 | Gearbox#41_body_bottom#01.SLDPRT | 228 KB |
| 35 | Gearbox#41_body_front#01.SLDPRT | 369 KB |
| 36 | Gearbox#41_body_left#01.SLDPRT | 253 KB |
| 37 | Gearbox#41_body_right#01.SLDPRT | 248 KB |
| 38 | Gearbox#41_body_top#01.SLDPRT | 137 KB |
| 39 | Gripper#01.SLDASM | 1.71 MB |
| 40 | Lightweigt mounting bracket.SLDPRT | 210 KB |
| 41 | Link_1_manipulator#01.SLDASM | 349 KB |
| 42 | Link_2_manipulator#01.SLDASM | 347 KB |
| 43 | Manipulator#01.SLDASM | 1.87 MB |
| 44 | Motor_200w#1.SLDASM | 111 KB |
| 45 | Motor_RE40_148867#01.SLDASM | 122 KB |
| 46 | Motor_gearbox_200w#1.SLDASM | 104 KB |
| 47 | Motor_gearbox_200w#2.SLDASM | 114 KB |
| 48 | Part2.SLDPRT | 218 KB |
| 49 | Pulley_TTW#1.SLDASM | 86 KB |
| 50 | Pulley_triangle_driver#1.SLDASM | 168 KB |
| 51 | Pulley_triangle_idler#1.SLDASM | 122 KB |
| 52 | Shaft_coaxial#11.SLDASM | 227 KB |
| 53 | TTW#11.SLDASM | 829 KB |
| 54 | Tige verrin 4''.SLDPRT | 92 KB |
| 55 | Tige verrin 6''.SLDPRT | 102 KB |
| 56 | Tube 50 cm.SLDPRT | 61 KB |
| 57 | Tube avant-bras.SLDPRT | 73.5 KB |
| 58 | Wrist#01.SLDASM | 1.03 MB |
| 59 | axe.SLDPRT | 61.5 KB |
| 60 | base1_manipulator#1.SLDPRT | 296 KB |
| 61 | base2_manipulator#1.SLDPRT | 208 KB |
| 62 | bearing_TTW#1.SLDPRT | 212 KB |
| 63 | bearing_TTW#2.SLDPRT | 209 KB |
| 64 | bearing_d20_D32_B7#1.SLDPRT | 207 KB |
| 65 | bearing_d25_D47_B8#11.SLDPRT | 226 KB |
| 66 | bearing_d25_D52_B18#11.SLDPRT | 209 KB |
| 67 | belt_H78#11.SLDPRT | 673 KB |
| 68 | belt_t_MM76#01.SLDPRT | 85 KB |
| 69 | belt_traks#2.SLDPRT | 742 KB |
| 70 | belt_triangle#L56.SLDPRT | 82 KB |
| 71 | bosh_d5_d10#01.SLDPRT | 67.5 KB |
| 72 | bosh_d6#01.SLDPRT | 69.5 KB |
| 73 | bosh_d8_gripper#01.SLDPRT | 67 KB |
| 74 | bosh_gripper.SLDPRT | 82 KB |
| 75 | bosh_shaft_flipper#1.SLDPRT | 106 KB |
| 76 | bosh_shaft_flipper#2.SLDPRT | 94 KB |
| 77 | bosh_shaft_triangle#1.SLDPRT | 103 KB |
| 78 | bosh_shaft_triangle#2.SLDPRT | 92 KB |
| 79 | camera_miniature_ZETRO#01.SLDPRT | 168 KB |
| 80 | camera_zoom_module#01.SLDPRT | 154 KB |
| 81 | chain_25#08.SLDPRT | 95 KB |
| 82 | chainwheel_25_11T#02.sldprt | 506 KB |
| 83 | chainwheel_25_16T#02.SLDPRT | 651 KB |
| 84 | chainwheel_25_24T#01.sldprt | 758 KB |
| 85 | coupling_motor_ECpowemax#01.SLDPRT | 105 KB |
| 86 | coupling_motor_ECpowemax#02.SLDPRT | 99.5 KB |
| 87 | coupling_motor_manipulator#01.SLDPRT | 167 KB |
| 88 | coupling_motor_manipulator#02.SLDPRT | 134 KB |
| 89 | cover_endeffector#01.SLDPRT | 245 KB |
| 90 | encoder_hedl5540#110514.SLDPRT | 122 KB |
| 91 | flange_bearing_RX64.SLDPRT | 131 KB |
| 92 | frame#1_base_gripper.SLDPRT | 252 KB |
| 93 | frame#2_base_gripper.SLDPRT | 157 KB |
| 94 | frame_back_gripper.SLDPRT | 224 KB |
| 95 | frame_flipper#1.SLDPRT | 560 KB |
| 96 | frame_front_endeffector.SLDPRT | 231 KB |
| 97 | frame_link_1#01.SLDPRT | 408 KB |
| 98 | frame_link_1#02.SLDPRT | 404 KB |
| 99 | frame_link_2#01.SLDPRT | 354 KB |
| 100 | frame_link_2#02.SLDPRT | 346 KB |
| 101 | gear_30T#12.SLDPRT | 531 KB |
| 102 | gear_30T#14.SLDPRT | 540 KB |
| 103 | gear_42T_mn5#01_wrist01.SLDPRT | 376 KB |
| 104 | gear_42T_mn5#02_wrist01.SLDPRT | 301 KB |
| 105 | gear_48T#2.SLDPRT | 747 KB |
| 106 | gear_60T_mn5#01_wrist01.SLDPRT | 476 KB |
| 107 | gear_60T_mn5#02_wrist01.SLDPRT | 361 KB |
| 108 | gearbox_gp42c#203129.SLDPRT | 146 KB |
| 109 | gearbox_worm_manipulator#01.SLDPRT | 323 KB |
| 110 | key_A4_4_20.SLDPRT | 80.5 KB |
| 111 | link1#1_gripper#01.SLDPRT | 156 KB |
| 112 | link1#2_gripper#01.SLDPRT | 108 KB |
| 113 | link1_gripper#01.SLDPRT | 151 KB |
| 114 | motor_ecpowermax30#305013.SLDPRT | 169 KB |
| 115 | mounting_motor_triangle#1.SLDPRT | 243 KB |
| 116 | mounting_motor_triangle#2.SLDPRT | 242 KB |
| 117 | nut_5#1.SLDPRT | 166 KB |
| 118 | nut_6#1.SLDPRT | 163 KB |
| 119 | nut_8#1.SLDPRT | 163 KB |
| 120 | nut_8#2.SLDPRT | 165 KB |
| 121 | pulley01_gripper.SLDPRT | 201 KB |
| 122 | pulley_H24#1.SLDPRT | 510 KB |
| 123 | pulley_H24#2.SLDPRT | 428 KB |
| 124 | pulley_H24#3.SLDPRT | 404 KB |
| 125 | pulley_H36#1.SLDPRT | 669 KB |
| 126 | pulley_H36#2.SLDPRT | 610 KB |
| 127 | pulley_L24#1.SLDPRT | 315 KB |
| 128 | pulley_L24#3.SLDPRT | 453 KB |
| 129 | pully_flipper_driven#11.SLDASM | 111 KB |
| 130 | pully_flipper_driver#11.SLDASM | 117 KB |
| 131 | retaining ring_d10#1.SLDPRT | 105 KB |
| 132 | retaining ring_d21#1.SLDPRT | 106 KB |
| 133 | ring_pulley_driver#1.SLDPRT | 167 KB |
| 134 | ring_pulley_flipper#1.SLDPRT | 180 KB |
| 135 | ring_pulley_idler#1.SLDPRT | 182 KB |
| 136 | ring_shaft_pulley#1.SLDPRT | 79 KB |
| 137 | ring_triangle#2.SLDPRT | 101 KB |
| 138 | rubber_gripper#01.SLDPRT | 87 KB |
| 139 | seat_CO2#03.SLDPRT | 235 KB |
| 140 | seat_bearing_TTW#1.SLDPRT | 169 KB |
| 141 | seat_bearing_flipper#12.SLDPRT | 203 KB |
| 142 | seat_bearing_flipper#21.SLDASM | 73.5 KB |
| 143 | seat_bearing_flipper#21.SLDPRT | 228 KB |
| 144 | seat_camera#01.SLDPRT | 198 KB |
| 145 | seat_idler#01.SLDPRT | 158 KB |
| 146 | seat_servoRX-64_OF64H set.SLDPRT | 445 KB |
| 147 | seat_servoRX-64_OF64S.SLDPRT | 229 KB |
| 148 | sensor_TPA#01.SLDPRT | 249 KB |
| 149 | servo_HSR5990TG#1.SLDPRT | 501 KB |
| 150 | servo_dynamixel_Rx64.SLDPRT | 387 KB |
| 151 | servo_dynamixel_Rx64_thrust.SLDPRT | 448 KB |
| 152 | shaft01_link2_gripper#01.SLDPRT | 92 KB |
| 153 | shaft_coupling#1_endeffector.SLDPRT | 143 KB |
| 154 | shaft_coupling#2_endeffector.SLDPRT | 169 KB |
| 155 | shaft_coupling_manipulator#01.SLDPRT | 127 KB |
| 156 | shaft_idler_11Tsprocket#01.SLDPRT | 80 KB |
| 157 | shaft_in#3.SLDPRT | 300 KB |
| 158 | shaft_link1#0.SLDPRT | 157 KB |
| 159 | shaft_link1#1.SLDPRT | 155 KB |
| 160 | shaft_out#1.SLDPRT | 212 KB |
| 161 | shaft_out#3.SLDPRT | 211 KB |
| 162 | shaft_pulley_flipper#11.SLDPRT | 204 KB |
| 163 | shaft_pully_triangle#1.SLDPRT | 103 KB |
| 164 | shaft_spacer01_gripper.SLDPRT | 143 KB |
| 165 | shaft_wrist_gripper02.SLDPRT | 161 KB |
| 166 | spacer_gripper#3.SLDPRT | 69.5 KB |
| 167 | spacer_link1_#1.SLDPRT | 144 KB |
| 168 | spacer_link2_#1.SLDPRT | 206 KB |
| 169 | spacer_linlk1#02.SLDPRT | 86 KB |
| 170 | spacer_linlk1#1.SLDPRT | 86 KB |
| 171 | spacer_linlk1#2.SLDPRT | 90 KB |
| 172 | spacer_linlk1#3.SLDPRT | 91 KB |
| 173 | spacer_teflon_manipulator#01.SLDPRT | 68 KB |
| 174 | spurgear_pinion_m1.5_T18.SLDPRT | 251 KB |
| 175 | tensioner_shaft#14.SLDPRT | 162 KB |
| 176 | triangle_in#11.SLDPRT | 484 KB |
| 177 | triangle_out#11.SLDPRT | 397 KB |
| 178 | washer_M5#02.SLDPRT | 69 KB |
| 179 | washer_M8#02.SLDPRT | 69 KB |
| 180 | washer_M8#03.SLDPRT | 70.5 KB |
| 181 | washer_d10_D20#11.SLDPRT | 74 KB |
| 182 | washer_d6_d15#01.SLDPRT | 67 KB |
| 183 | washer_shaft_gripper#01.SLDPRT | 72.5 KB |
| 184 | ~$多功能履带式机器人三维模型.SLDASM | 8 B |
| 185 | 上下盖板.SLDPRT | 327 KB |
| 186 | 下盖板.SLDPRT | 225 KB |
| 187 | 侧边外壳.SLDPRT | 643 KB |
| 188 | 内轮(1).DWG | 282 KB |
| 189 | 内轮.DWG | 282 KB |
| 190 | 减速箱基板(1).dwg | 1.2 MB |
| 191 | 减速箱基板.dwg | 1.2 MB |
| 192 | 前后外壳.SLDPRT | 259 KB |
| 193 | 多功能履带式机器人三维模型.SLDASM | 6.37 MB |
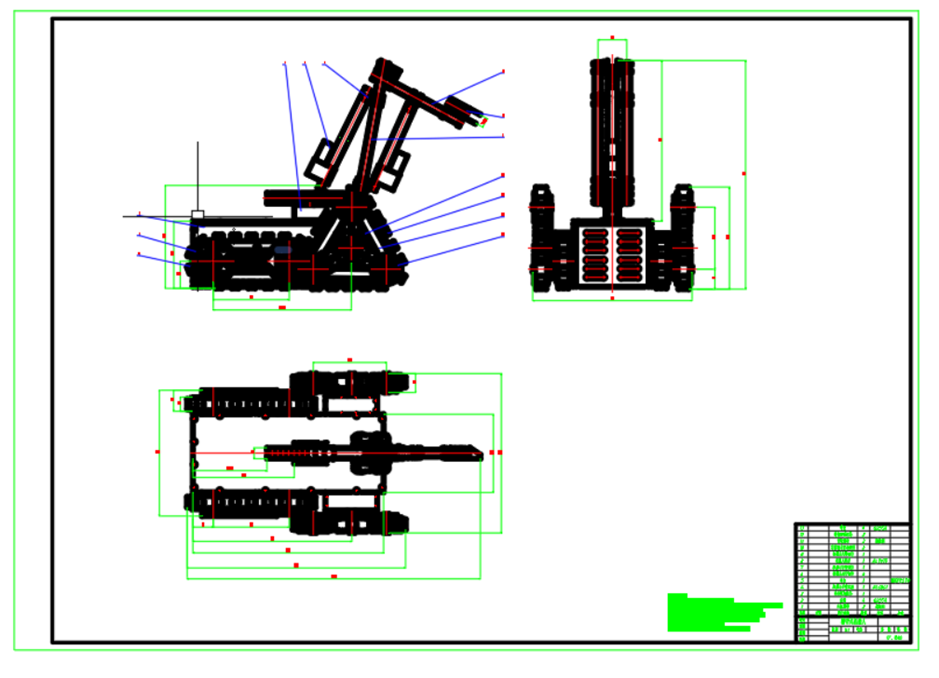
| 194 | 履带式机器人总装图(1).DWG | 901 KB |
| 195 | 履带式机器人总装图.DWG | 901 KB |
| 196 | 履带式机器人状态图(1).DWG | 789 KB |
| 197 | 履带式机器人状态图.DWG | 789 KB |
| 198 | 履带式机器人行走状态图(1).DWG | 801 KB |
| 199 | 履带式机器人行走状态图.DWG | 801 KB |
| 200 | 弹簧.SLDPRT | 386 KB |
| 201 | 弹簧固定杆.SLDPRT | 127 KB |
| 202 | 弹簧轴固定板.SLDPRT | 216 KB |
| 203 | 弹簧顶板.SLDPRT | 150 KB |
| 204 | 电机固定座(1).dwg | 1.17 MB |
| 205 | 电机固定座.dwg | 1.17 MB |
| 206 | 行走部分总装图(1).DWG | 763 KB |
| 207 | 行走部分总装图.DWG | 763 KB |
| 208 | 越障行走机的结构设计4.30.docx | 2.55 MB |
| 209 | 车体框架基板.dwg | 1.19 MB |
| 210 | 轴1.SLDPRT | 344 KB |
| 211 | 轴2.SLDPRT | 294 KB |
| 212 | 轴承座.dwg | 1.17 MB |
| 213 | 输出轴1.dwg | 1.18 MB |
| 214 | 输出轴2.dwg | 1.19 MB |
| 215 | 输出轴3.dwg | 1.17 MB |
| 216 | 链条张紧轮(1).dwg | 1.17 MB |
| 217 | 链条张紧轮.dwg | 1.17 MB |
| 218 | 链条张紧轮固定板(1).dwg | 1.17 MB |
| 219 | 链条张紧轮固定板.dwg | 1.17 MB |
| 220 | 链条张紧轮固定轴(1).dwg | 1.18 MB |
| 221 | 链条张紧轮固定轴.dwg | 1.18 MB |
| 222 | 链轮1(1).dwg | 1.18 MB |
| 223 | 链轮1.dwg | 1.18 MB |
| 224 | 链轮2(1).dwg | 1.18 MB |
| 225 | 链轮2.dwg | 1.18 MB |
| 226 | 镜向侧边外壳.SLDPRT | 226 KB |
| 227 | 齿轮1(1).dwg | 1.18 MB |
| 228 | 齿轮1.dwg | 1.18 MB |
| 229 | 齿轮2(1).dwg | 1.17 MB |
| 230 | 齿轮2.dwg | 1.17 MB |
| 231 | 齿轮3.dwg | 1.18 MB |
| 232 | 齿轮轴(1).dwg | 1.19 MB |
| 233 | 齿轮轴.dwg | 1.19 MB |


下载该图档需要消耗500金币!







![LS519拉手[LS519S4A105001]](https://yushuangwang2.oss-accelerate.aliyuncs.com/fileimg/m676d5424abd94/01_home.jpg)

